陀螺教学仪是一种用于确定姿态的仪器。经典的陀螺仪采用高速旋转的刚性转子,可以在不依赖任何外部信息的情况下对载体姿态进行测量和均衡。在现代,陀螺仪的名称已经扩展到功能像经典陀螺仪没有刚性转子的仪器。
1852年,科学家发明了一套可以显示地球自转的仪器,称为陀螺仪。在20世纪40年代,陀螺仪开始被用作早期导弹上制导系统的姿态参考。但直到20世纪50年代,陀螺仪在结构原理上改进不大,普遍仍沿用福柯所作的陀螺仪,测量精度不高。20世纪50年代以后,陆续出现了液浮、磁浮、动压气浮、静电悬浮和柔性支撑的陀螺仪转子技术,很大地改进了陀螺仪的结构,大大提高了测量精度。1975年,激光陀螺仪研制成功。它没有机械摩擦,不受重力加速度的影响,承受振动的能力强。它已广泛应用于飞机和导弹的惯性导航系统中。
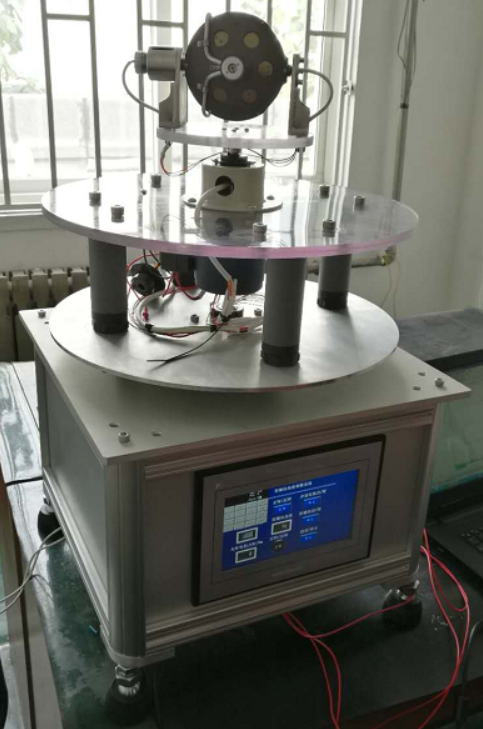
陀螺教学仪一般由转子、内外环和基座组成。通过由轴承安装在内圈上的转子高速旋转的。内圈通过轴承与外圈连接,外圈通过轴承与运动物体(底座)连接。与基座相比,转子具有3个角运动自由度,称为3自由度陀螺仪。它也被称为自由转子陀螺仪,因为转子可以自由地向任何方向转动。此外,采用同步电机作为陀螺电机,以保持转子的速度恒定。控制系统中的陀螺仪应该有一个元件(角度传感器)输出姿态角度信号。为了使陀螺仪在特定的状态下工作(如要求陀螺仪保持水平基准),应在内、外圈轴上安装力矩器,对陀螺仪进行约束或修改。
陀螺教学仪是根据惯性原理工作的。它具有两个重要的特性:
(1)轴向性:高速旋转的转子具有在惯性空间中尽量保持旋转轴方向稳定的特性。转子的角动量即矢量是转子绕自转轴J,的转动惯量与旋转角速度10^8的乘积(H=J*10^8)。轴向性意味着矢量H试图保持指向不变。
(2)进动:在外扭矩作用下,旋转转子尽量使其旋转轴沿外扭矩作用方向的短路径转动。陀螺仪转子在重力G的作用下没有从支点下落,而是以角速度w绕垂直线连续旋转,这就是进动。进动角速度w=(施加扭矩)/H,H是重力产生的扭矩。干涉力矩引起的转子进动角速度称为陀螺的漂移速率,以度/小时为单位,是衡量陀螺性能的主要指标。

 客服1
客服1 